Enhancement of efficiency of flapping when running via transcutaneous electrical stimulation of spinal cord
Фотографии:

ˑ:
Ph.D. E.A. Mikhaylova
Postgraduate student V.A Kozlov
V.Yu. Ershov
Dr.Biol., Professor R.M. Gorodnichev
Velikie Luki State Academy of Physical Culture and Sport, Velikie Luki
Keywords: electrical stimulation of spinal cord, motor system.
Introduction. The spinal cord stimulation is widely used in rehabilitation of patients with spine pathologies [3]. Segmental electrical surface stimulation is also used to assess the functional state of the spinal division of the CNS [1]. Healthy subject research suggests that transcutaneous electrical stimulation of the spinal cord (TESSC) causes stepping-like movements of the lower limbs, involving the hip, knee and ankle joints [4]. The experiments, aimed at the study of the effects of TESSC on the speed-strength qualities of athletes, were first conducted in 2014. It was shown then that training load performed against the background of TESSC for 10 days contributed to an increase in the speed-strength abilities of the shin muscles [2]. In this view, practical implementation of the technology of electrical stimulation in sport presents itself as promising.
The purpose of the study was to examine the effects of electrical stimulation of the spinal cord, being realized exclusively when performing running loads, on the biomechanical and electromyographic characteristics of movement.
Materials and methods. 7 sprinters aged 20 to 23 years were involved in the experiment. All the subjects were informed about the experiment conditions, and gave a written consent to participate in the experiment in accordance with the Declaration of Helsinki and Russian and International laws. The subjects ran at maximum speed for 10 sec on the treadmill (HP Cosmos Saturn) switched on in a passive mode. While running, they were subject to continuous electrical stimulation. The stimulation was provided by a 2-channel stimulator KULON (SUAI, Saint Petersburg). The stimulating electrodes were placed at the T11-T12 and T12-L1 vertebrae between the acanthas. Intensity and frequency of the stimulating pulse were selected for every student individually. Each subject ran for 10 sec without stimulation and for 10 sec with stimulation.
During the exercises we registered the electrical activity of the bilateral muscles: medial head of gastrocnemius, tibialis anterior, rectus femoris, biceps femoris, gluteus and tensor fascie latae. The electromyogram was recorded by means of the bi-polar surface electrodes using a 16-channel electroneuromyograph ME-6000 (Finland). The kinematic characteristics of movements were registered using a video-based system Qualisys (Sweden). It was the flapping phase that was selected for analysis - from the moment the hip started to move forward until the moment the knee joint reached the highest point. During 10 sec, the subjects performed 18 running cycles on the average. A 10-second exercise was divided into 3 parts each consisting of 5 cycles: 4-8 cycles (start of an exercise), 9-13 cycles (mid-exercise) and 14-18 cycles (end of an exercise). For reference we took the mean values in 5 cycles.
Results and discussion. When analyzing the changes in the knee angle during acceleration of the swinging leg, we found that this index was lower when affected by electrical stimulation compared to that when running without TESSC. The average knee angle in the 4-8 cycles when running without stimulation was equal to 61.70, when running with stimulation - 58.00, which is less by 6% (p<0.05). In the 9-13 and 14-18 cycles, when running with stimulation, the angle between the thigh and shin was 58.40 and 61.20, respectively. The hip angle at the time of the maximum elevation of the thigh was also lower when running with stimulation.
Thus, in the 4-8 cycles of running without stimulation it was equal to 83.650, with stimulation - 82.690. In the 9-14 cycles this angle equaled 82.570 and 80.970 when running without stimulation and with stimulation, respectively. Upon taking off from the support, the leg somewhile continued its rotating motion around the axis passing through the hip joint. But the elastic binders slowed this rotation down, and the entire rotating motion of the thigh changes into angular acceleration of the shin around the axis passing through the knee joint. This acceleration allows a sprinter to achieve the minimum angle between the shin and thigh. If we consider the movement of the swinging leg as pendulum motion, the maximum shin bending reduces the length of the pendulum, which allows moving it at a higher rate further on. When conducting a comparative analysis of the angular velocity of the thigh, we detected an increase of this indicator when exposed to stimulation. Throughout the exercise with stimulation, the angular velocity values remained increased compared to running without stimulation. The greatest differences were observed in the last five running cycles, and they ranged between 13.4-27.4% (Fig. 1, A). Consequently, it can be stated that acceleration of athlete's thigh became more efficient with each running cycle.
If we trace the dynamics of running parameters in comparable conditions, we can state a progressive reduction of the angular velocity and an increase in the values of the knee angle in the last five cycles of running without stimulation. When applying electrical stimulation in the last cycle of running, the angular velocity of the thigh remained high. Therefore, at the end of the exercise, against the background of developing fatigue, electrical stimulation enables to preserve the parameters determining the efficiency of the flapping actions.
When reconstructing the cycle of running moves in the two joints of the left leg while running without stimulation against the background of TESSC, we obtained the trajectory of movement of the knee and ankle joints. As seen from Fig. 1 (B), the ankle joint trajectory becomes more rounded (lower panel), while the knee joint moves more vertically.
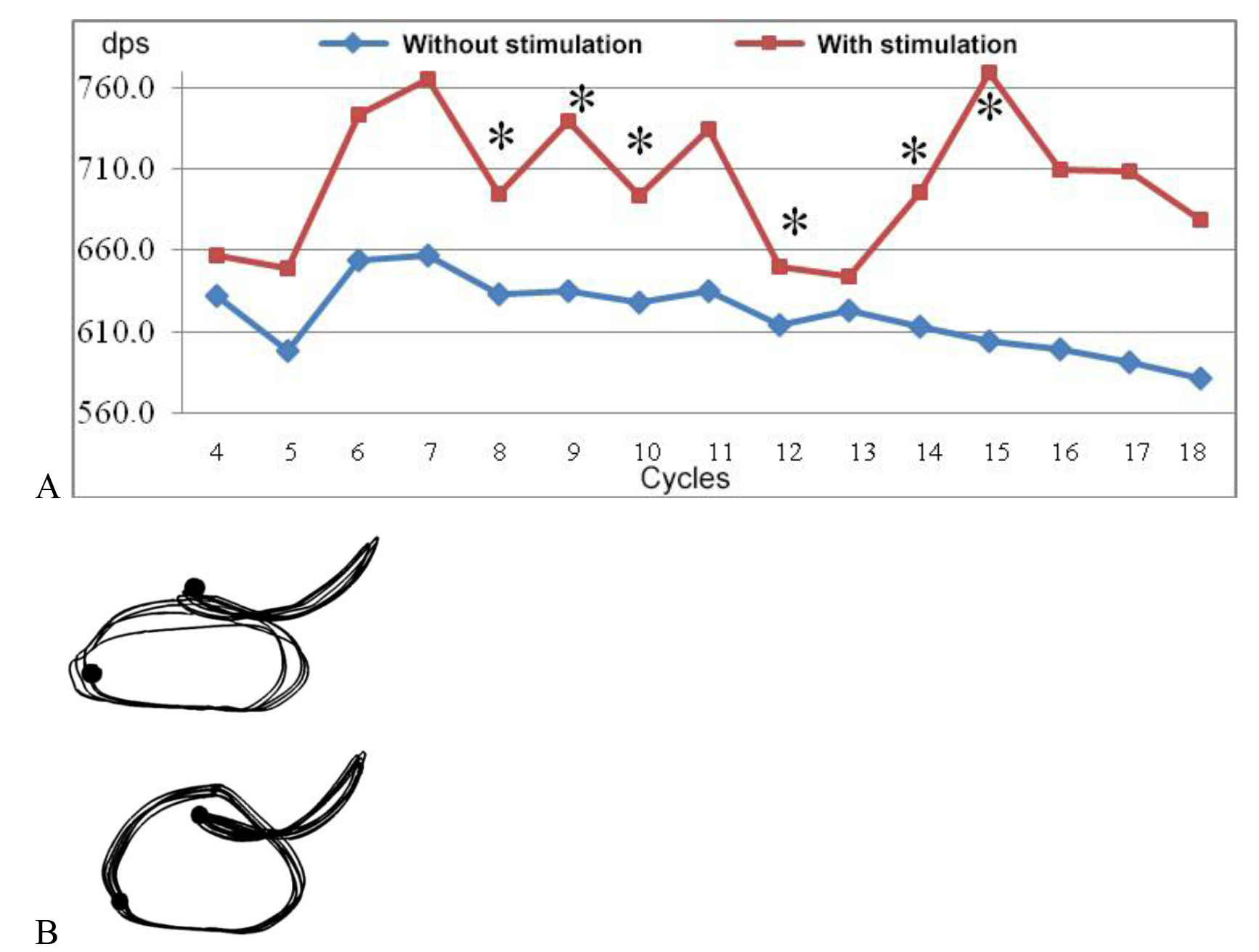
Fig. 1. Dynamics of angular velocity of thigh (А), movement coordination in knee ankle joints (B).
The results of comparison of the amplitude of biopotentials of the left leg muscles, registered when performing flapping movements, are presented in Table 1. The activity of the tensor fasciae latae when running with stimulation exceeded the values of running without stimulation in all the parts of the exercise. The amplitude of biopotentials was higher by 32.9% at the beginning, by 36.3% in the middle and by 39.8% at the end of the run (p<0.05). The activity of the rectus femoris was also increased compared to running without stimulation. These muscles are the hip flexors, and they are dominant in the swinging actions. Increased activity in the flapping phase when running with stimulation contributes failed to reveal any significant increase of the amplitude of biopotentials of the gastrocnemius muscle, the values were increased by only 5.1%, 6.8% and 3.3% at the beginning, in the middle and at the end of the exercise, respectively (p> 0.05). The amplitude of biopotentials of the tibialis anterior when running with stimulation was lower in the beginning of the exercise by 14.1% (p<0.05). In the middle and at the end of the exercise the amplitude values remained decreased relative to running without stimulation, by 9% and 9.2%, respectively. Among the measures of efficiency of flapping movements are relaxed shin muscles when changing the swing-up leg. Thus, being affected by TESSC, the major parameters of the flapping movement change: the knee angle and angular velocity of the thigh. These changes while running under normal conditions will promote an increase in the acceleration of CCG.
Table 1. Changing amplitude of biopotentials of left leg muscles when performing swinging actions, mkV (M±m)
|
Muscles |
4-8 cycles |
9-13 cycles |
14-18 cycles |
|||
|
Without stimulation |
With stimulation |
Without stimulation |
With stimulation |
Without stimulation |
With stimulation |
|
|
Tensor fasciae latae |
348.5±37.78 |
463.4±26.85* |
379.1±61.42 |
517.0±41.47* |
379.6±57.76 |
530.8±48.25* |
|
Rectus femoris |
241.0±23.35 |
247.6±38.39 |
248.7±26.59 |
256.9±42.79 |
248.4±39.33 |
255.2±41.02 |
|
Gastrocnemius |
92.1±12.67 |
96.8±23.36 |
91.0±9.85 |
97.2±20.73 |
86.3±10.85 |
89.2±17.63 |
|
Tibialis anterior |
395.7±38.84 |
340.2±37.03* |
386.0±45.19 |
351.4±45.86 |
369.5±34.23 |
335.7±47.56 |
Note: * - significance of differences at p<0.05 relative to running without stimulation
The increase of the amplitude of EMG of the working muscles testifies to the increase in the neuronal activity of the motoneuron pool of the specified muscle when TESSC is applied. It can be assumed that electrical stimulation of the spinal cord, activating the dorsal root afferents, affects the step movements generator and increases the excitability of the locomotor neuronal network. Human motor activity is noted for its functional reorganization. Trace processes associated with multiple activation of additional motor neurons are likely to ensure establishment of new relationships and formation of a new, more efficient, structure of an integrated system of movements.
Conclusion. Transcutaneous electrical stimulation of the spinal cord during running promotes an increase of the amplitude of biopotentials of the hip flexors in the flapping phase, and the angular velocity of the thigh. The spinal cord stimulation enables to preserve the structure of movements at the end of the exercise, even in the setting of developing fatigue.
References
- Andriyanova, E.Yu. Mekhanizmy dvigatel'noy plastichnosti spinnomozgovykh nervnykh tsepey na fone dolgovremennoy adaptatsii k sportivnoy deyatel'nosti (Mechanisms of motor plasticity of spinal nerve circuits on the background of long-term adaptation to sports activity) / E.Yu. Andriyanova, O.V. Lanskaya // Fiziologiya cheloveka. – 2014. – V. 40. – № 3. – P. 73–85.
- Gorodnichev, R.M. Vliyanie chrezkozhnoy elektricheskoy stimulyatsii spinnogo mozga na funktsional'nye svoystva motornoy sistemy sportsmenov (The influence of transcutaneous electrical stimulation of spinal cord on functional properties of athletes' motor system) / R.M. Gorodnichev et al. // Teoriya i praktika fiz. kul'tury. – 2013. – № 12. – P. 35–38.
Corresponding author: gorodnichev@vlgafc.ru


 Журнал "THEORY AND PRACTICE
Журнал "THEORY AND PRACTICE